Design and Manufacturing是面向弘毅学堂工科试验班2018级学生首次开设的一门兼具理论与实践的全英文教学课程,由刘胜院长、胡耀武教授、李淼副教授主要负责。课程主体分为理论教学和动手实践两大部分,教授内容包含建模仿真、有限元、静力学、动力学等。课程实验以小组竞赛的形式展开,结合课程相关内容,共开展了四个比赛,分别是“自由漫步”、“抓取、搬运”、“弹珠投射”和“穿越弯道”,课程实验部分由李淼副教授的研究生邓智峰、雷自伟协助工作,比赛详细内容可在此网址查看:https://github.com/MiaoLi/Robot_WHU_2020。

学生被分为8个小组,每两个小组参加同一个比赛,要求学生根据比赛规则,自己设计、制造、组装并调试机器人.在准备比赛的过程中,各组学生思维活跃,设计了许多有趣、可行的比赛机构。
参加“自由漫步”比赛的两个小组,积极查找国内外四足机器人相关研究成果,进一步确定设计方案和优化设计模型。


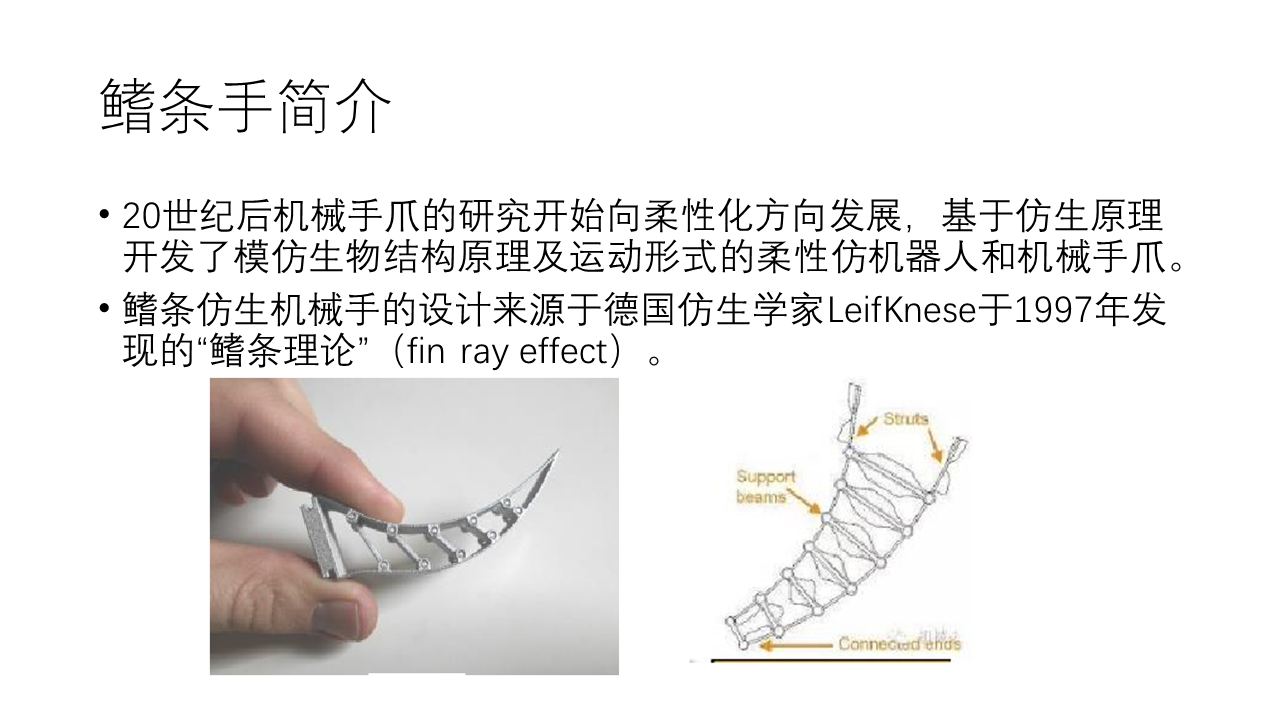
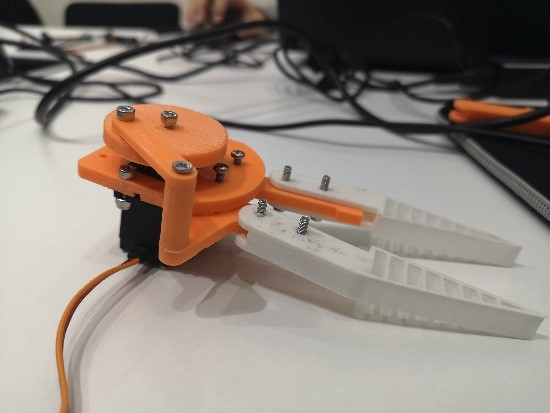
“抓取、搬运”比赛的小组利用柔性鳍条手结构作为手指的设计,可以对目标物体进行包络式抓取,取得了很好的效果。
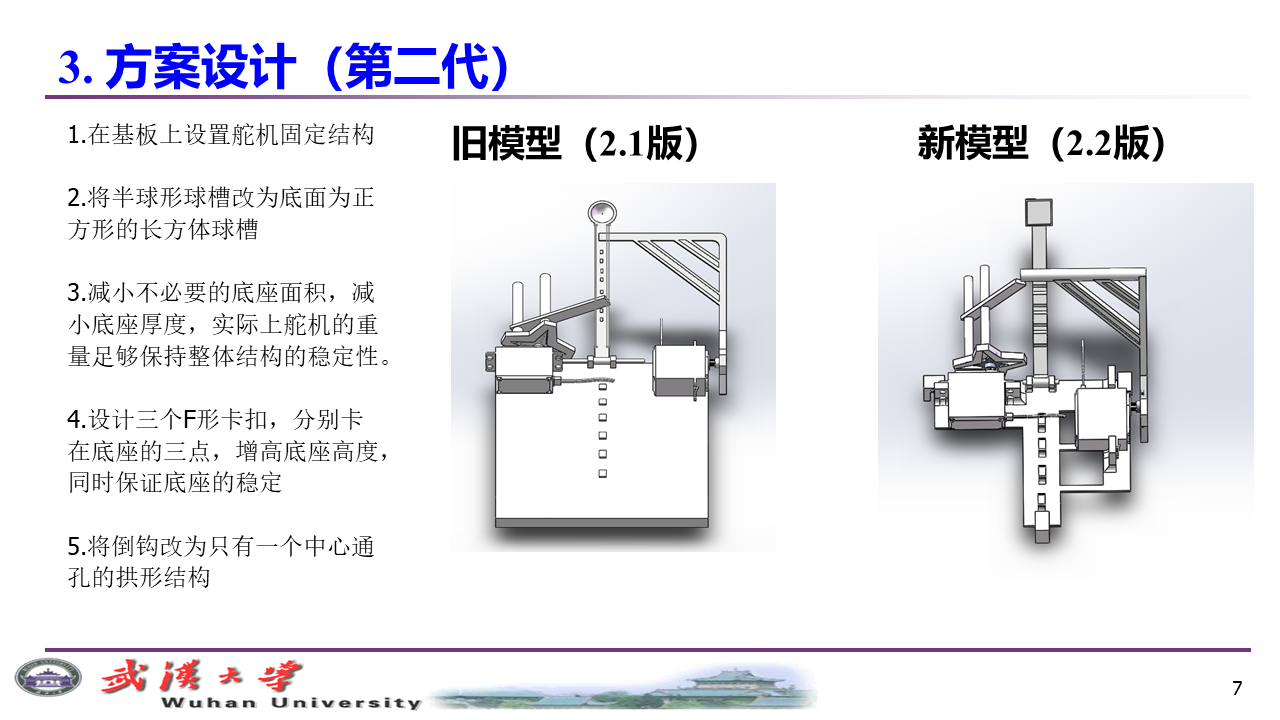
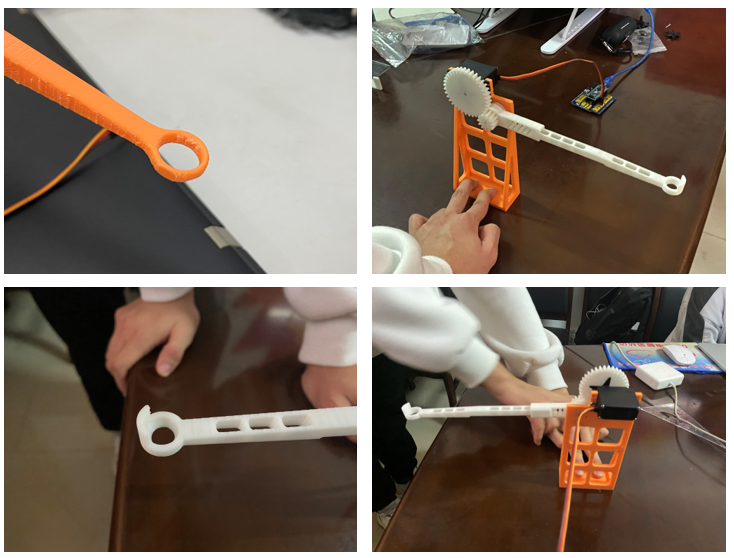
参加“弹珠投射”比赛的两个小组则选取了两种不同的方案,一组是利用弹簧储能,以期实现弹珠的稳定发射,另外一组直接用舵机作为动力输出,简单直接,希望以快取胜。在最后的比赛中,这两组势均力敌,竞争异常激烈,究竟谁胜谁负,详见文末比赛视频链接。
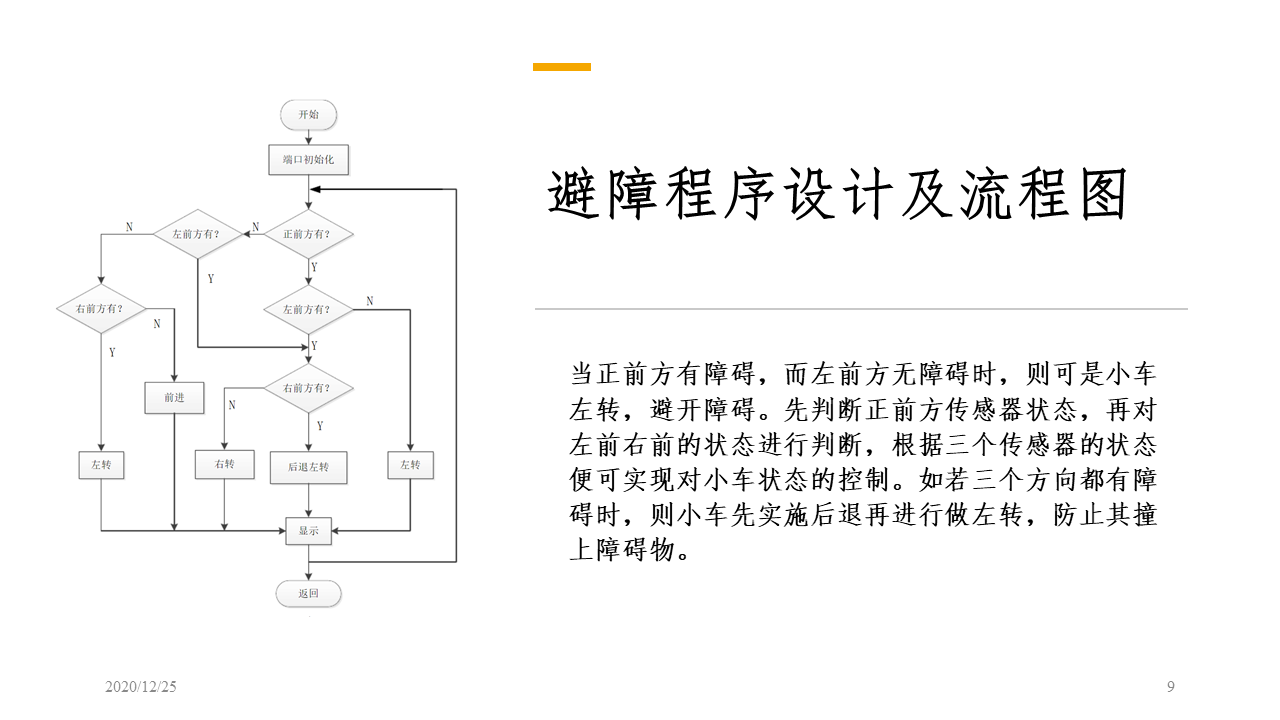
“穿越弯道”比赛主要考验两组队员的控制调试能力,如何结合利用超声测距传感器和红外测距传感器,设计巧妙的控制框架是这一比赛的难点,不过两组学生都各有巧妙构思。

经过几周的设计、制作、调试,在12月26日下午,各组学生先进行了PPT的展示,主要介绍了他们从确定方案到设计模型,以及最后的机构调试等重要环节,期间穿插了许多奇思妙想,让人眼前一亮。紧接着就开始了四场激烈而又精彩的比拼,所有人都热情高涨,随着比赛有条不紊地进行,我们最后评选出了成绩最好的前三名,并颁发了比赛的奖品。
四场比赛的全程视频可以在此观看:https://share.weiyun.com/9eFaJ9gI。
