近日,国际综合性期刊《自然·通讯》(Nature Communications)在线发表了我校工业科学研究院李洋研究员课题组在机械原理、机械设计和结构力学交叉领域的研究成果,论文题目为“Easy-to-actuate multi-compatible truss structures with prescribed reconfiguration”(易驱动多协调结构设计方法),如图1所示,论文链接:https://www.nature.com/articles/s41467-024-49210-3。

图1. 论文封面截图
该灵感来自2021年春季,当李洋研究员在讲授刘胜院士引入到弘毅学堂的《设计与制造》课程时,意识到当两个四连杆耦合时,可以产生一个三稳态结构,如图2所示。这种通过四连杆耦合构造的多稳态结构和现有的设计均不相同。论文随后展示了这种四连杆拼接法可构造多种新式的多稳态结构,以及其在变刚度夹爪里的潜在应用,如图3所示。后续该方法会被应用于可展结构、软体机器人、高爆发关节和变体无人机。
论文第一署名和通讯单位均是武汉大学工业科学研究院,论文作者分别为工研院博士生艾琳(弘毅学堂毕业生)、加州理工学院博士生银树焜(弘毅学堂毕业生)、弘毅学堂本科生何伟霞、工研院硕士生张沛东,以及李洋研究员。大学生工程训练与创新实践中心的陈东和黄亚老师为此项目提供了机械加工的支持。另外,该论文的姊妹版“多稳态可重构机构”发表在高质量力学期刊Extreme Mechanics Letters,论文链接:https://doi.org/10.1016/j.eml.2024.102175。

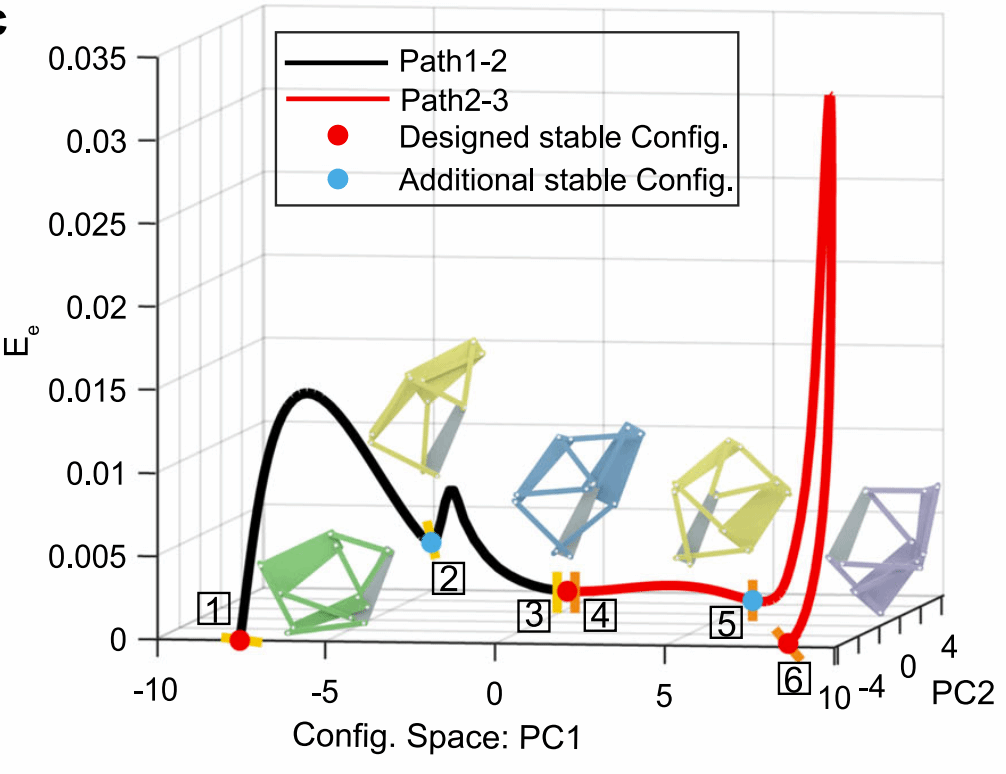
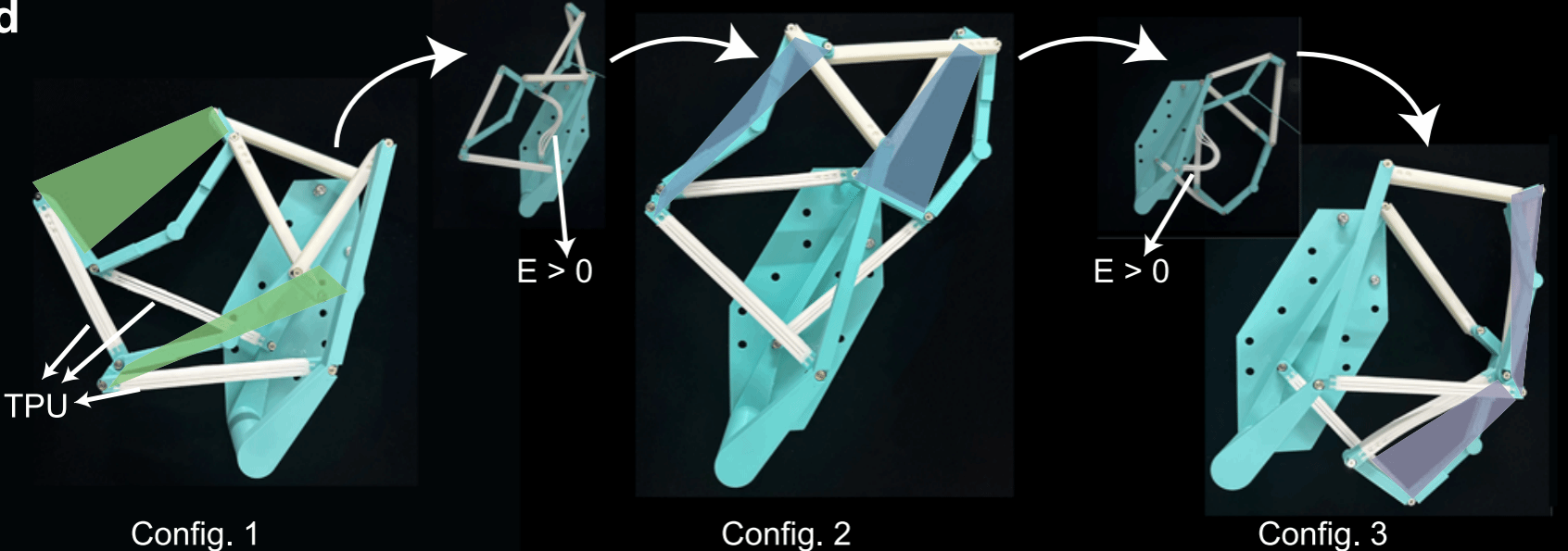
图2. 两个四连杆拼接,形成了一个三稳态结构,其中,杆被假设为弹性可变形
(a)一种更复杂的多稳态结构
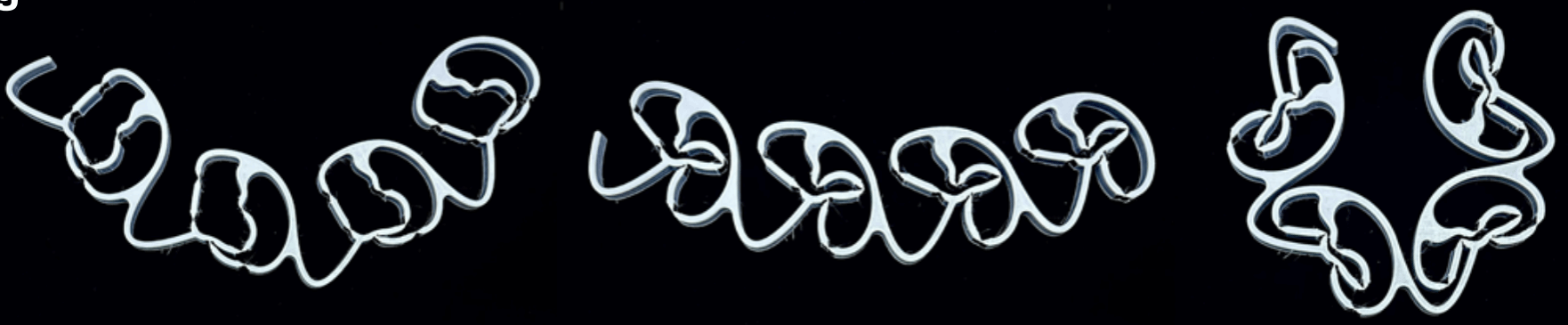
(b)另一种更复杂的多稳态结构
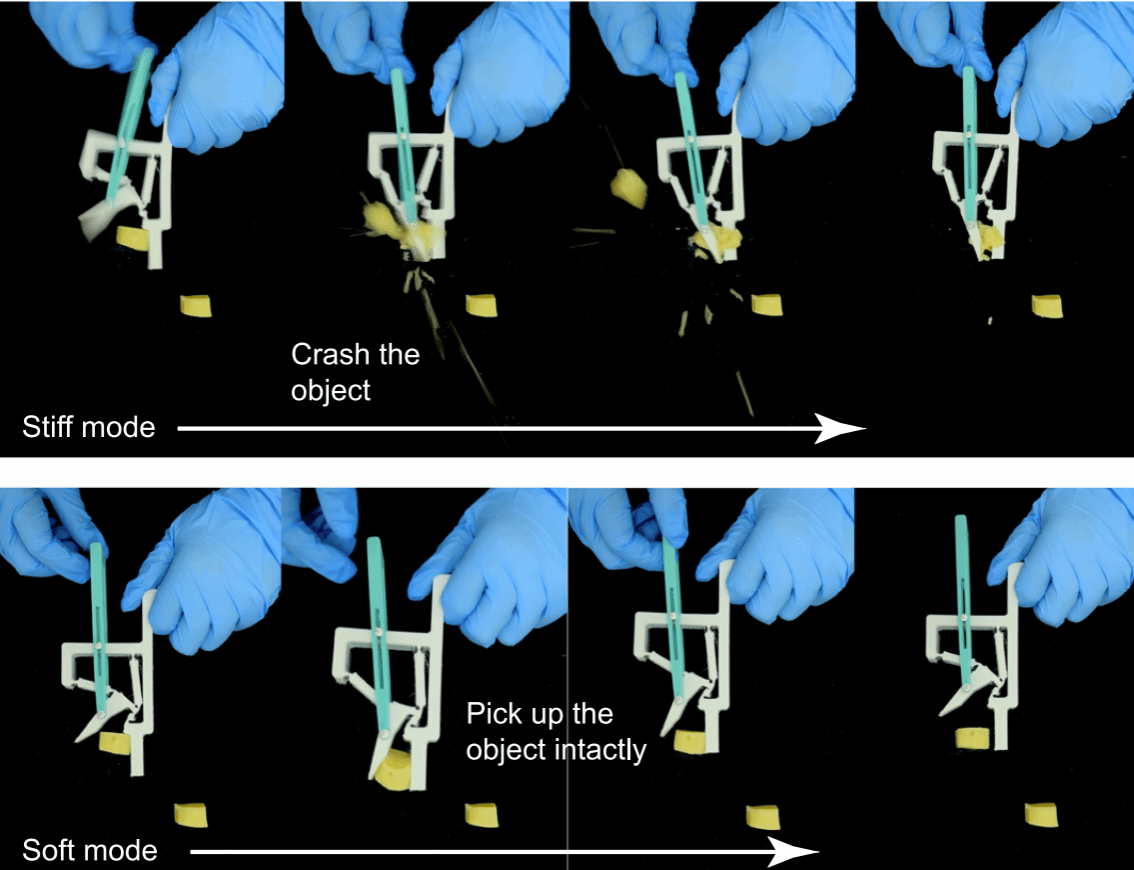
(c)用四稳态结构构造变刚度夹爪,其仅用一个驱动器分别实现将豆腐轻轻夹起和脉冲式夹碎
图3. 依据四连杆拼接形成的不同多稳态结构,以及其在变刚度夹爪里的应用演示