武汉大学工业科学研究院(ITS)薛龙建教授课题组(NISE-Lab)仿树蛙脚黏附结构取得重要进展,研究成果于近期发表于国际一流期刊《ACS Nano》(影响因子:13.942,工程技术一区top),题为“Hybrid Surface Patterns Mimicking the Design of the Adhesive Toe Pad of Tree Frog”。武汉大学工业科学研究院为第一完成单位。
ACS Nano原文链接:http://pubs.acs.org/doi/10.1021/acsnano.7b04994
树蛙等动物在潮湿的环境下生活,可以在植物叶面上以及叶面之间跳跃、爬行。在这个过程中树蛙主要依赖的是它脚趾的黏附与摩擦力。树蛙脚的黏附与摩擦力主要由其脚趾上的微观结构以及粘液决定。在前期研究中(Adv. Funct. Mater. 2015, 25, 1499–1505,影响因子12.124),发现树蛙等蛙类脚趾上的微观结构主要表现为五边形和六边形,且多边形之间存在几微米宽的沟道(如图1a,b所示)。这些沟道能将接触界面处的液体排出到接触界面之外,从而实现固体和固体之间的直接接触,获得较高的黏附与摩擦力。
最新研究发现某些树蛙脚上的多边形结构其实是由角蛋白纳米纤维束组成。受此启发,NISE-Lab开发了一种微纳复合仿生结构。这种结构由刚性的聚苯乙烯纳米棒以及柔软的硅橡胶组成;聚苯乙烯纳米棒垂直分布在硅橡胶的正六边形柱状阵列中(如图1c,d所示)。这种复合结构虽然简单,但可以在300nm的尺度上调控接触界面的应力分布:最大应力的位置从微米柱的边缘向中心移动,且应力最小值分布在微米柱的边缘。这样的应力分布有效地提高了结构的黏附力。而增强的黏附力和相对较高的结构刚度则增强了结构的摩擦力,首次在仿生结构中实现了黏附力与摩擦力的同步增强。
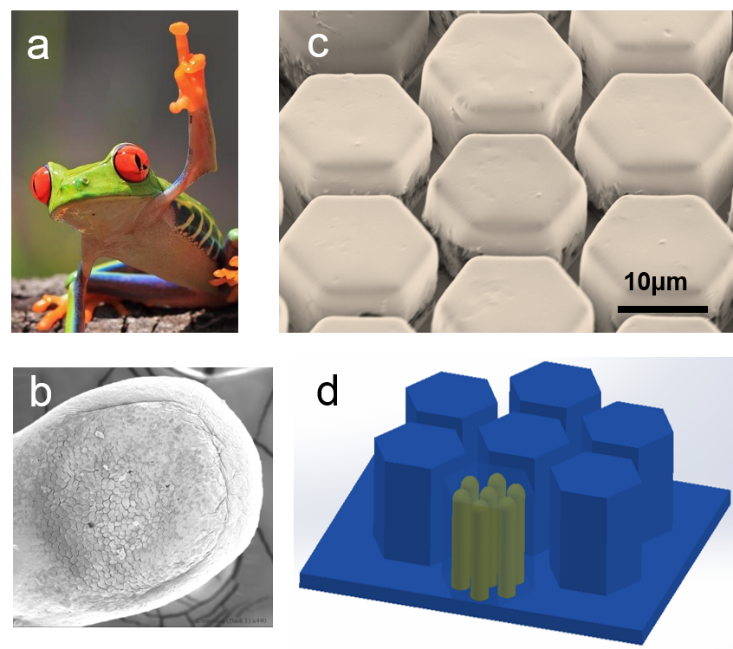
图1. (a) 树蛙及其(b)脚趾的表面结构;(c)仿树蛙脚复合材料及其(d)结构示意图,蓝色代表硅橡胶,黄色代表聚苯乙烯纳米柱。
基于该课题的重要进展,薛龙建教授受邀于ChinaNANO 2017国际会议上做了题为“Turning Effective Elastic Modulus for Structured Adhesives” (结构黏附材料的有效弹性模量调控)的邀请报告(图2)。


图2. NISE-Lab课题组成员于ChinaNano2017会场合影。
薛龙建,武汉大学动力与机械学院教授,工业科学研究院教授。中科院取得博士学位后,作为洪堡学者、马普学者在德国长期从事科研工作。研究领域包括仿生功能材料、聚合物薄膜稳定性、聚合物薄膜图案化、微纳结构加工等。到目前为止, 已经发表包括《自然•通讯》在内的高水平SCI科研论文40余篇,获批中国专利3项,申请欧盟、美国专利各一项,中国专利多项。多次受邀为国内外专业书籍撰写相关章节。担任十余种国际学术期刊审稿专家。
NISE-Lab欢迎具有物理、化学、材料、生物背景的学生加入,课题组常年招收博士后。课题组与德国具有广泛的合作,课题组成员有很多机会到德国、欧盟交流学习。