新闻网讯(通讯员 周通)近日,《先进科学》(Advanced Science)发表了“多稳态空间连杆”(Intrinsically Multi-Stable Spatial Linkages)的工作(图1)。该成果是李洋研究员课题组继“易驱动多协调结构设计方法”(Easy-to-actuate multi-compatible truss structures with prescribed reconfiguration, Nature Communications, 2024)之后,在机械原理和结构力学领域的又一进展。这一系列的论文夯实了基于多协调性的多稳态平面结构与空间结构设计方法的理论基础,为航空航天、精密医疗、微纳机器人设计等领域提供了新视角、新方法。
图1:文章在线发表截图
研究人员一直希望能将科幻电影中的“变形金刚”落到实际,但是,如果采用电影中所展示的全驱动方案实现炫酷的变形,整个机器人系统的复杂程度将难以想象。基于此,研究人员提出了多稳态结构,这种设计可以在多个状态保持稳定,可适用于多种不同的应用场景,同时状态间的快速切换也不需要复杂驱动装置,因此很好地平衡了变体机器人设计中的运动复杂度和驱动装置复杂度之间的矛盾。武汉大学工业科学研究院李洋研究员团队面向三维空间连杆提出了一种多稳态空间结构(Intrinsically Multi-Stable Spatial Linkages,IMSS连杆)逆向设计新方法,并据此证明了所有过约束机构均能转化成为多稳态结构(图2),大大丰富了多稳态空间结构设计方法。
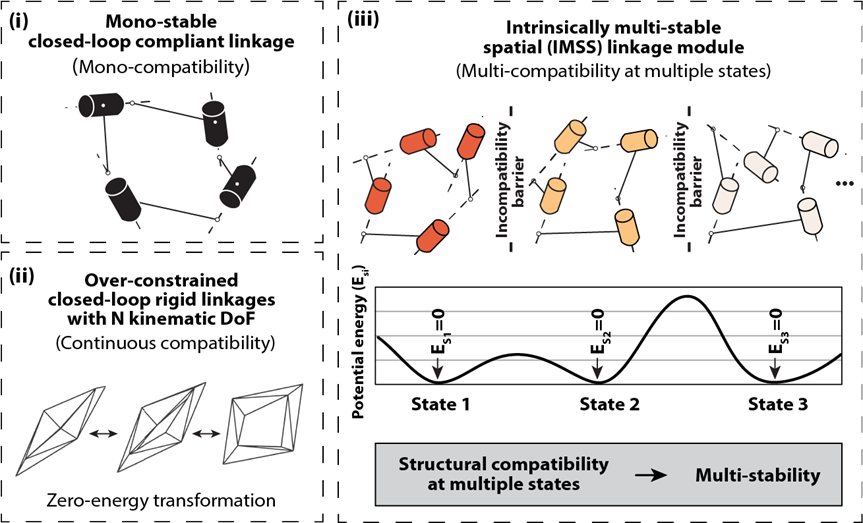
图2:多稳态空间连杆连杆结构设计思路。(i)一般而言,闭环空间连杆只有一个稳态;(ii)通过增加特殊的约束条件,闭环空间连杆获得一个自由度而成为一个过约束机构,如图中的Bennett连杆可连续变体,事实上是在这个连续变体路径上的每一个形态均是结构兼容;(iii)如果仅要求路径上某些离散状态结构兼容,则结构仅能在这些状态稳定,因此闭环空间连杆即成为了多稳态空间连杆。
该研究从传统的过约束连杆机构出发,设计并制造了双稳态空间四连杆结构(图3,对应于Bennett过约束连杆机构)、三稳态空间六连杆结构(图4,对应于Bricard过约束连杆机构)。传统多稳态结构设计大多仅能用于对称构型,而本方法针对空间结构创新性地引入了多协调性设计原理(Multi-compatibility principle),使得稳定形态的设计空间扩展至空间非对称构型;同时,因其多稳态来自于结构的内在几何协调性,而不需要加入额外装置以构造稳态,整个多稳态系统是个形式精简的内在多稳态结构系统(intrinsically multi-stable structures)。

图3:双稳态空间四连杆结构。采用简单线驱即可完成两个状态之间的切换。
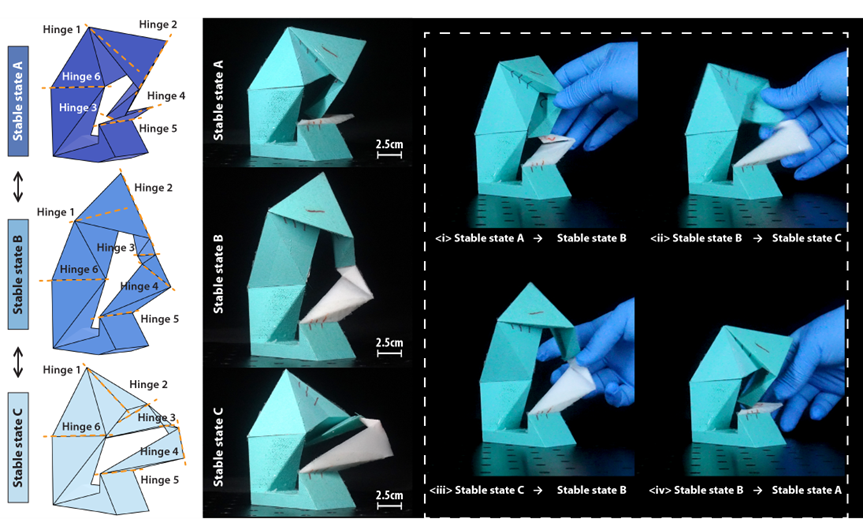
图4:三稳态空间六连杆结构。采用手驱动完成三个状态之间的切换。
研究团队同时采用了单元耦合的方式构造了四稳态空间六连杆结构(图5),以探索更多稳态的可能性;同时面向典型应用场景构造了可展开管状结构(图6A)和爆冲式机器人夹爪(图6B)。所有结构实例均表明,采用少数简单驱动器,如形状记忆合金,即可完成所有稳态间的切换。

图5:四稳态空间六连杆结构。通过两个双稳态四连杆结构的拼接,完成四个稳态的构造,各稳态均可通过2组形状记忆合金(SMA)驱动完成遍历。
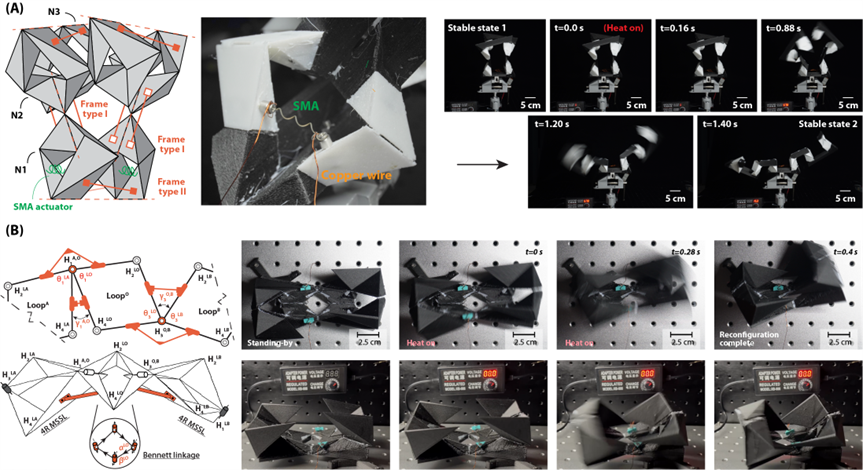
图6:(A)可展开管状结构。具有“展开”和“合拢”两个稳态,采用2组形状记忆合金驱动完成状态间切换;(B)爆冲式机器人夹爪。采用1组形状记忆合金完成快速抓取动作。
论文第一署名和通讯单位均是武汉大学工业科学研究院,论文作者分别为工研院博士生周通,硕士生黄冲、苗壮志,以及李洋研究员。大学生工程训练与创新实践中心的陈东、黄亚和李敏老师为此项目提供了机械加工的支持。该研究得到了国家自然科学基金和广东省基础与应用基础研究基金的资助。
论文链接:http://doi.org/10.1002/advs.202402127