薛龙建教授团队(NISE-Lab)在提升软体机器人运动能力方面取得重要进展,研究成果发表于材料领域顶尖期刊Materials Today(影响因子为24.372),并被选为内封面文章(图1)。论文题为Bioinspired footed soft robot with unidirectional all-terrain mobility(《具备定向全地形运动能力的仿生有足软体机器人》)。论文第一作者为博士生汪鑫,通讯作者为刘胜教授和薛龙建教授。该研究得到国家重点研发计划项目和国家自然科学基金的支持。

图1. 论文被选为内封面
软体机器人相较于传统刚性机器人,往往具有更大的自由度和变形能力,可以在诸如生产生活、医疗救援、航空航天和军事等领域具有巨大的应用潜力,受到广泛关注。若软体机器人的尺寸进一步降低到厘米及以下,可以在封闭、狭窄的空间(如废墟狭缝、生物体内等)完成各种复杂作业。然而,人们很少关注小尺寸软体机器人的足部设计,许多机器人甚至缺乏足部设计。由于没有良好的足部设计,软体机器人往往需要粗糙表面或具有特殊结构的基底表面来提供前进运动的反作用力,且运动过程很难精确控制。
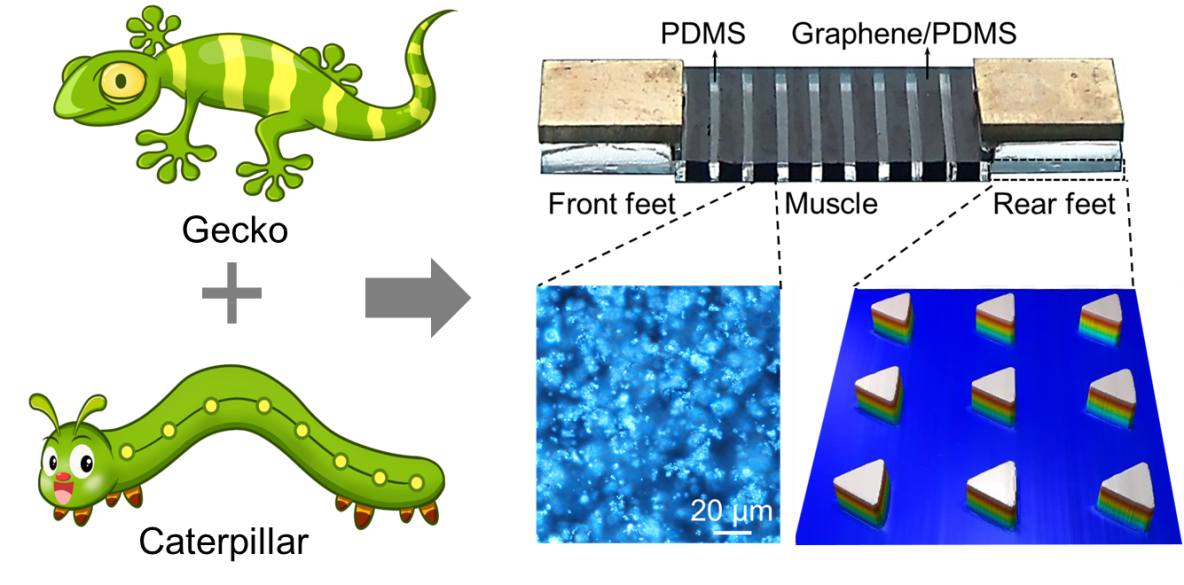
图2. 借鉴壁虎脚黏附性能和尺蠖运动步态设计的软体机器人Geca-Robot。
为提高小尺寸软体机器人的表面适应能力,薛龙建课题组设计制备出一种新型有足软体机器人Geca-Robot。这种软体机器人借鉴了壁虎脚的取向性黏附能力和尺蠖前后足交替运动的步态:以仿壁虎脚刚毛的微米三棱柱阵列作为“脚”,以交替排列的透明PDMS条带和石墨烯/PDMS复合材料(GP)条带组成“肌肉”。在光照(紫外到红外光全波段均可)时,前足向前移动,关闭光照时,后足向前移动;交替的开/关光照驱动Geca-Robot不断先前运动。由于有仿壁虎脚的足部设计,可在光滑/粗糙、干燥/潮湿、水平/倾斜以及在极端温度环境中(约零下20℃至100℃)向前运动,且可负载超过其自重50倍的重量。另外,可通过控制光强和光照时间来精确控制机器人的运动速度和距离。
Geca-Robot足部的仿生设计是其实现多表面运动的关键,为今后小尺寸软体机器人的研发提供了新思路。
NISE-Lab课题组长期致力于仿生黏附材料的相关研究,其成果还发表在Small(Small, 2019, 1904248)、ACS Applied Materials & Interfaces(ACS Appl. Mater. Interfaces,2019, 11, 46337 2020, 12, 16, 19116–19122)、ACS Nano(ACS Nano, 2017, 11, 9711)、Advanced Functional Materials(Adv. Funct. Mater. 2015, 25, 1499)、Nature Communications (Nat. Commun. 2015, 6, 6621)、Nano Letters(Nano Lett., 2013, 13, 5541)等国际顶尖期刊上,并出版英文专著《Bio-Inspired Structured Adhesives》(Springer, 2017)。
论文免费下载链接:https://authors.elsevier.com/a/1b9HH4tRoWL1to
NISE-Lab 课题组网站:http://niselab.whu.edu.cn/